

































Vehicular Ad Hoc Networks (VANETs) are a specialized form of Mobile Ad Hoc Networks (MANETs) designed to enable wireless communication between vehicles and infrastructure in intelligent transportation systems. In a VANET, vehicles serve as communication nodes, exchanging information directly with each other via vehicle-to-vehicle (V2V) communication and with fixed infrastructure, such as roadside units (RSUs), through vehicle-to-infrastructure (V2I) communication.
However, the dynamic nature of VANETs, characterized by high vehicle mobility, varying densities, and rapidly changing topologies, introduces significant challenges, including: Overwhelming the network with excessive message broadcasts, managing communication across a large number of vehicles, and Communication collisions caused by vehicles being out of each other’s direct range but sharing common receivers. To address these challenges, clustering has emerged as a pivotal strategy, and the Cluster Head (CH) is responsible for managing the cluster. It coordinates intra-cluster communication and serves as a gateway for inter-cluster or V2I communication.
Why Vehicles as Graph?
In VANETs, the network’s dynamic and complex nature of vehicles like in areas of Delhi, necessitates a robust approach to model relationships between vehicles. By grouping vehicles in consideration of correlated spatial distribution and relative velocity, these cluster groups can serve as the foundation for accident or congestion detection, information dissemination, and entertainment in the applications of ITS.
Traditional methods like static similarity measures focus only on pairwise connections. Thus, Graph structures serve as an ideal solution for representing these relationships due to their flexibility and ability to capture intricate topologies.
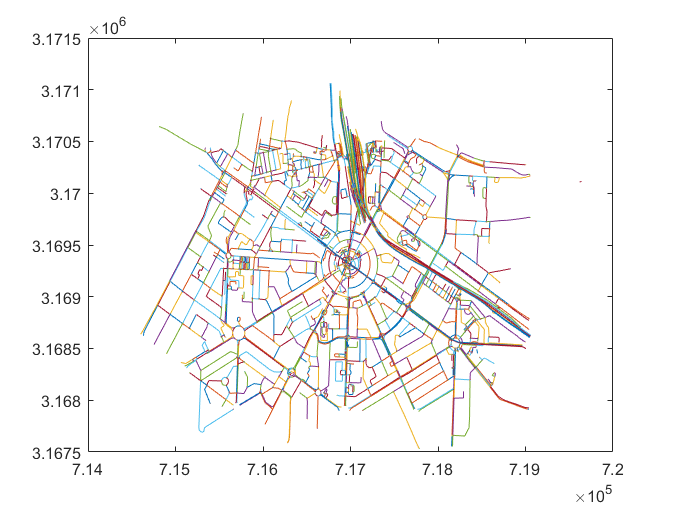
Cannaught Place Delhi — Openstreet Map for VANET data collection in SUMO
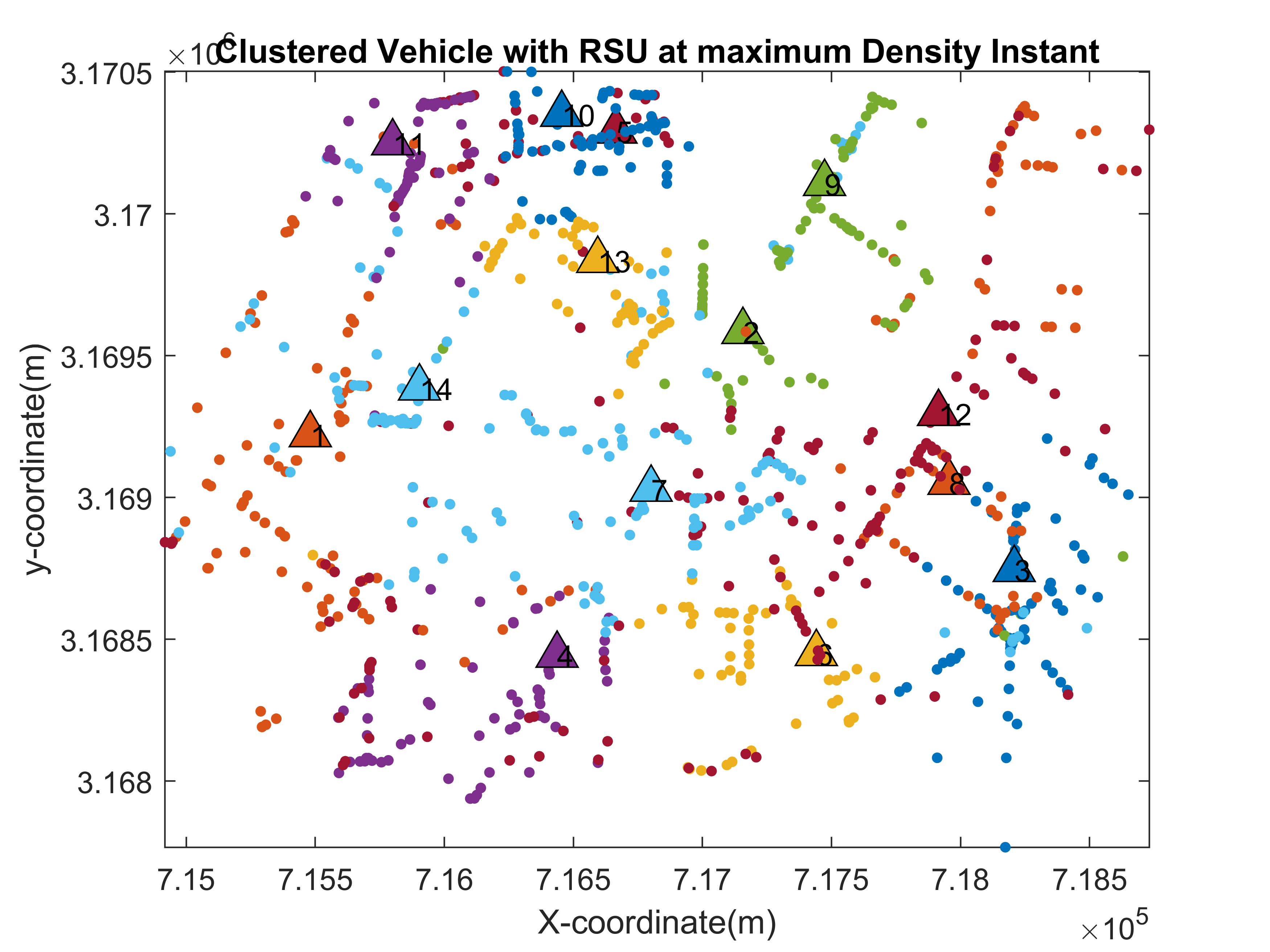
Representation of Vehicles with clustering and RSU from SUMO
Why use Graphical Deep Learning in VANET?
Traditional clustering methods are based on weighted or fuzzy decision rules on vehicle features like speed and position. However, these are static and ignore the dynamic nature of VANET. VANETs experience rapid changes in network structure due to high vehicle mobility. Some researchers recently proposed using Spectral Clustering, which is related to Eigenvalue Decomposition (EVD) on the normalized graph Laplacian matrix, to enhance clustering stability in VANET.
However, these methods leverage single features like distance or graph structure. To address these challenges, Graph Convolutional Networks (GCNs) a state-of-the-art deep learning technique designed specifically for graph-structured data is proposed. Unlike traditional clustering methods that focus solely on graph connectivity, GCNs combine node features (e.g., speed, direction, and driver behavior) with structural information. This integration results in richer embeddings that better capture the dynamics of VANETs.
VANET Projects
VANET source code and projects to explore